Sensörler ve kameraların sayesinde birçok sürücüsüz sürüş için insandan üstün doğrulukla araçlar teorik olarak kendilerini sürebilir hale geldi. Burada en zorlu iki etmen var ki, tekini bu yazımda ele almak istiyorum. İlki çevresel faktörler hava şartları, yolların durumu,çevrede sinyal kirliliği ,sensorlerin sağlık durumu gibi faktörler diğeri ise tüm bu sistemler arasındaki bağlantıların ve kontrol yapısının oluşturulması, bu konu üzerindeki araştırmalarımı ve bilgilerimi anlatacağım.
Fuzzy Logic #0
Türkçesi Bulanık Mantık olarak geçmektedir ve ilk olarak 1960lı yılların başında ortaya atılmıştır. Adından da anlayacağınız üzere bir mantık çeşitidir. Mantık birçoğumuzun lise yıllarında gördüğü “ve”, “veya”, ”ise”,”ancak ve ancak” gibi mantık önermelerinin doğruluğunu bulmaya ve bu önermelere 0(yanlış) yada 1(doğru) gibi ifadelerle adlandırıyorduk. O zaman mantık konusunun önemini yada gerçek hayatta kullanım alanlarını tam kavramamış olsak da temel elektronik ve bilgisayar bilimi bu konu üzerine kurulmuştur. Çünkü mantık gerçek hayattaki herhangi bir problemi ele alış şeklimize göre bu problemi belirli düşünce yöntemleriyle sayılar dünyasına nasıl aktarabileceğimizi bize gösterir. Fuzzy Logic’de aynı prensip ile daha geniş bir perspektifde gerçek dünyanın konuları üzerinde çalışmakta ve kullanım alanlarında kontrol sistemleri, otomasyon, robotik ve sibernetik gibi mühendislik bilimlerinin pek çok alt dalında bulanık mantığın izlerine rastlıyoruz.
Klasik mantık ile ayrılma noktası ise 21.yüzyılın içinde bulunduğumuz soru ve önermelerin 0 yada 1 gibi kesin yargılara varmamasından kaynaklı. Tam olarak ölçülüp kanıtlanamayan önermeler birçok noktayı “bulandırdığı” için fuzzy logic ortaya atılmıştır. Yoruma açık konularda mesela “bu kişi varlıklıdır” veya “bu kişi akıllıdır” gibi önermelerin ortaya ne kadar done ve bu doneleri destekler sonuçlar elde etsek dahi bu önermelerin 0 ve 1 gibi “mutlak yargı” olabilmeleri imkansızdır.
Sensör ve kameraların geliştiğini anlatmama gerek yok hatta birçoğu şu an insanlardan daha keskin ve ince detayları yakalabiliyor. Betimleme gücümüzü kendi alanlarında geçme noktalarına geldiler peki bu sensörleri yapan ve dataları anlamlandıran bizler çevremizi betimleme konusunda onlar kadar hassas olamadığımız için yaptığımız önermeler “bulanık” gelebilir.
Temel kontrol sistemleri yapısında kavramsal olarak çok basittir. Bir girdi, işleme ve çıkış aşamalarından oluşur. Kısaca girdi sensörün veya sinyal girdisi olarak dış dünyadan sistemimize girenler olarak düşünülebilir. İşleme aşaması, her uygun kuralı çağırır ve her biri için bir sonuç oluşturur, ardından kuralların sonuçlarını birleştirir. Son olarak, çıkış aşaması birleştirilen sonucu tekrar belirli bir kontrol çıkış değerine dönüştürür.Gerçek bir senaryo ile düşünürsek bu senaryoya programcılığın temelinde ki şart(conditions) mantığında ki IF,ELSE ve THEN yapısı ile anlatmak istiyorum. IF (sıcaklık “soğuk”) THEN dönüş (ısıtıcı “yüksek”) Bu kural, bir “soğuk” gerçek değeri olan “sıcaklık” girişinin doğruluk değerini kullanır. sonuç “yüksek” bir değer olan “ısıtıcı” çıkışı için bulanık küme ile sonuçlanır. Bu sonuç, net bir kompozit çıktı elde etmek için diğer kuralların sonuçlarıyla birlikte kullanılır. Genel riskten korunma yöntemleri arasında “yaklaşık”, “yakın”, “yakın”, “yaklaşık”, “çok”, “hafif”, “çok”, “aşırı” ve “biraz” sayılabilir. Bu işlemler kesin tanımlara sahip olabilir, ancak tanımlar farklı uygulamalar arasında önemli ölçüde değişiklik gösterebilir.
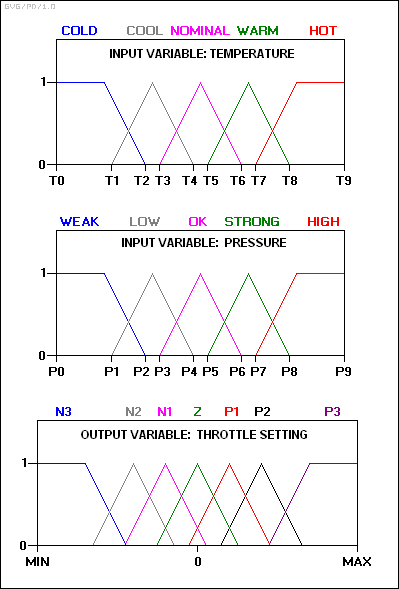
N3: Large negative.
N2: Medium negative.
N1: Small negative.
Z: Zero.
P1: Small positive.
P2: Medium positive.
P3: Large positive.
Wikipedia’dan aldığım örnek ve resim üzerinde adlandırmadan (label) ve bu label işleminden sonra fuzzy logic kuralı yazmak istesek,
Kural 1: Sıcaklık soğuksa ve basınç zayıfsa, O zaman P3.
Kural 2: Sıcaklık soğuk ve basınç düşükse, SONRA P2.
Kural 3: Sıcaklık soğuksa ve basınç iyi ise, O zaman Z.
Kural 4: Sıcaklık soğuk ve basınç güçlü ise, SONRA gaz kelebeği N2.
Daha araştırmaya yönelik çalışmalardan simülasyon bazlı fuzzy logic control yapı araştırması için Tufan Kumbasar’ın yazmış oluğu makaleyi sizlerle paylaşıyorum.
Intelligent Transportation Systems kitabında fuzzy logic ve gerçek araç kontrol yapısınıda okumanız üzerine linkini aşağıda paylaşıyorum.
En son olarakda advance fuzzy logic control guidance makalesinide sizlerle paylaşıyorum.
